项目一:水环境监测
一、研制背景
随着人口和工业的增长,水质污染情况越来越严重。近年来我国已发生多起水环境污染事件,如松花江污染事件,安徽巢湖,无锡太湖蓝藻大面积爆发等,不仅严重影响工业生产和人民的日常生活,同时带来极大的负面影响。连续实时快速布设的水环境参数监测院系统的研究就显得尤为紧迫,本项目针对分布式水质检测需求,设计小型浮标式水质检测系统,并构成水质监测传感网。监测区域的水质参数可通过多种方式传送到远程数据中心进行汇总,并可对数据进行分析和软测量。
二、研制目标
本项目为针对自然水体监测的实时监测网络系统。整个系统有水质参数获取、传输、信息处理和发布四大部分构成。浮标式传感器通过接力传输或者GRPS通信,将水质参数和相应的地理信息传送到远程数据中心进行整理和分析,然后通过网页形式发布。随着人口和工业的增长,水质污染情况越来越严重。近年来我国已发生多起水环境污染事件,如松花江污染事件,安徽巢湖,无锡太湖蓝藻大面积爆发等,不仅严重影响工业生产和人民的日常生活,同时带来极大的负面影响。连续实时快速布设的水环境参数监测院系统的研究就显得尤为紧迫,本项目针对分布式水质检测需求,设计小型浮标式水质检测系统,并构成水质监测传感网。监测区域的水质参数可通过多种方式传送到远程数据中心进行汇总,并可对数据进行分析和软测量。
三、研制成果
本项目实现的功能与指标如下。
在淀山湖实施具有无线自组网能力的分布式水环境监测示范系统,整个系统由水质参数获取、传输、信息处理和发布四大部分构成。
配套中心数据库与发布网站实现的主要系统功能:
设计了防水防腐浮标设备,采用太能+电池联合供电,可以自主工作。
可以对温度、电导率、溶解氧(DO)、pH和叶绿素水质参数自动进行部分或全部采集。
通过无线模块构建水质传感网络的监测中心,通过GPRS网络实验采集数据的传输。
架设了配套网站作为信息发布中心,友好的显示各店的水质参数及地理位置。
利用神经网络和模式分类技术,选取传感器测量的水质参数pH值、溶解氧(DO)和氧化还原电位(ORP),可对COD参数进行软测量评估
主要技术指标:
四、论文及专利
本项目相关研究内容申请国内专利两项,发表国内外论文6篇,详细列表如下:
专利列表:
论文列表:
田曾益,胡波,刘顺佳,“用于传感器网络周期性数据收集的自协商分时MAC协议”.通信学报,2008,Vol29,No.11,pp. 31-39(EI收录,AccessNumber:085211817878)
曾益,胡波,刘顺佳.一种用于传感器网络的全局时钟模型,小型微型计算机系统,2009,Vol30,No.03,pp.545-550.
Zeng, Yi, Bo Hu, and Shunjia Liu. Vector Kalman filter using multiple parents for time synchronization in multi-hop sensor networks. Sensor, Mesh and Ad Hoc Communications and Networks, 2008. SECON'08. 5th Annual IEEE Communications Society Conference on. IEEE, 2008.
Zeng Y, Liu S, Hu B. Maximal likelihood estimation in time synchronization with multiple parent nodes in wireless sensor networks[J]. 2007.
曾益, 刘顺佳, 胡波. 一种用于传感器网络的全局时钟精度测量方法[J]. 中国通信学会第五届学术年会论文集, 2008.
刘顺佳, 曾益, 胡波. 传感器网络时钟同步中基于多父节点的卡尔曼滤波算法[J]. 计量学报, 2009 (4): 363-368.
五、使用情况
上海市青浦区环境监测站于2008年7月至2009年5日实施了该检测系统,用于实时监测淀山湖的水质情况。系统工作正常稳定。
整个系统由水质参数获取、传输、信息处理和发布四大部分构成。浮标式传感器通过接力传输或者GRPS通信,将水质参数和相应的地理信息传送到远程数据中心进行整理和分析,然后通过网页形式发布,可以定时监测水质的温度、电导率、溶解氧(DO)、pH和叶绿素变化。
六、研制总结
本课题历时一年半,完成了分布式浮标式水质监测系统的软硬件设计,其中关键技术都为自主知识产权。系统功能与国际大公司产品相比更为丰富,成本低廉,可以推广到大面积自然水体水质监测领域。
项目二:无人机智能水质监测
一、研制背景
我国水资源总量为2.8万亿立方米。其中地表水2.7万亿立方米,地下水0.83万亿立方米,水资源总量居世界第六位,人均占有量为2240立方米,在世界银行连续统计的153个国家中居第88位。我国的水资源现状存在总量紧缺、人均占有量低、地区分布不均、水土资源不相匹配、水体污染日益加重、城市缺水情况凸显等问题。其中,水质安全问题在水环境问题日益严重的当下备受关注,随着时代的发展,居民对和身体健康密切相关的环境问题的关注度不断提高,同时,工业化和城镇化的发展导致水污染的范围不断扩散、程度不断加深。如何有效监测水质已经成为当下一个很重要的科学研究议题。传统的水质监测方法主要有人工采样监测法、水质监测站监测法、水生物监测法以及无线遥感监测法均存在一定的问题诸如:监测周期长、人力成本耗费大、监测的水域范围有限、受水域限制明显等缺点。高效便捷的水质监测设备和仪器在这样的时代背景下显得尤为重要。
二、研制目标
目前的水质采样通常采用人工采样和自动采用的方式,对于如江河、湖泊等大范围水域的动态采水,传统人工采集的方式效率低下,而传统的自动采集通常只能采集固定点的水样情况,不具备动态随机性。对于污染严重或者突发化学品泄漏的水域,由于环境恶劣,具有极大的危险性,不适合使用人工采集。此外,在面对如湿地,沼泽或者是多礁石地带,采用无人船或者人工作业的方式都很难达到指定区域完成采集。
本项目目的在于提出了一种基于无人机的水质监测系统的设计实现方案,具有高机动性,大覆盖范围的特点,能够代替人的作业,到达人不便到达的地方完成水样提取,极大地提高了水样采集的效率和覆盖范围,保障了水质检测人员的安全,有效提高了水质监测和防治的效率。
三、研制成果
功能描述分为整体功能描述和各个模块的功能描述。下方展示的是系统的功能描述。
任务规划:地面站可以设定三个采水点位置,结合相应的指令集最终生成任务脚本并发送给飞行器,控制四轴飞行器按指定路径飞行。
视频存储:飞行器从摄像头中采集视频,通过Turbot平台实时存储在本地,存储的视频有较高的保真度。
实时视频回传:通过模拟图传模块实时传输采水过程,保证一定的实时性和低丢包率,画质清晰可以有效监控飞行状态和采水图像。
自动采水:到达指定取水点后无人机按指定要求进行悬停并开始采水过程,完成采水后自主进入下一个取水点,完成后自动返航。
紧急机制:当四轴飞行器飞行角度不佳、前方遇有障碍物或者无法顺利采水时,地面站可以接管飞行器的控制。
接下来展示的是系统的各项指标。
飞行控制:四轴飞行器在飞行过程中飞行高度为4米,上下误差为±0.5米,左右偏差为±0.5米,到达采水点后进入悬停状态,无人机整体距水面1米,整个采水过程中飞机稳定。
视频存储:视频存储稳定可靠,存储的视频不卡顿。
实时视频回传:在信号稳定的情况下,回传延时小于1秒,视频流畅。
自动采水:采水量稳定可靠,飞行过程中水样保存良好。
紧急机制:当四轴飞行器飞行角度不佳、前方遇有障碍物、采水过程出现问题时,地面站可以接管飞行器的控制。
四、使用情况
由于整个系统分为四轴飞行器部分和采水部分,所以最后的测试环节先对这两个部分行了测试。
四轴飞行器部分的测内容包括以下几个方面:
该系统的测试地点是复旦大学恒隆物理楼旁的草坪,首先由地面站指定飞行路径,然后飞行器自动在该路径上巡航。同时模拟图传模块实时将飞行器搭载的摄像头采集的信息发送回地面站,在地面站进行视频监控,并检测到达目标地点时Turbot能否正确地将指令传送给Genuino。
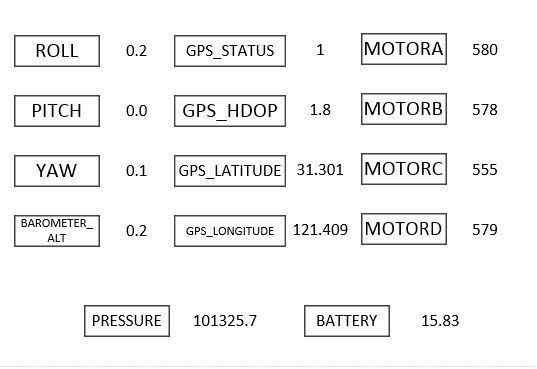
参数显示测试结果:
下图显示的是四轴飞行器刚要起飞时的状态参数,通过这些参数我们可以很好地了解飞行器飞行过程中细节参数,在飞行器某些状态发生突变时可以迅速接管,防止飞行器的坠落。
远程控制测试结果:
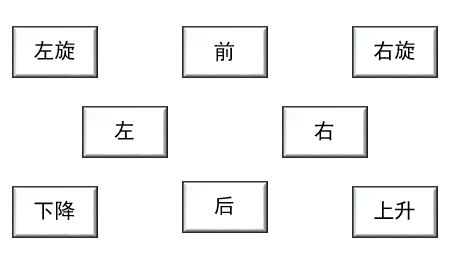
下图显示的是四轴飞行器刚要起飞时的状态参数,通过这些参数我们可以很好地了解飞行器飞行过程中细节参数,在飞行器某些状态发生突变时可以迅速接管,防止飞行器的坠落。
采水部分测试结果:
采水部分的测试主要是在实验室中独立测试采水机构功能,该模块运作良好,基本符合预期。
产品实物图:


五、研制总结
本系统利用四轴飞行器机动、灵活,起降自由,可以深入复杂水域的特点,将其应用在了水质监测当中,充分发挥了四轴飞行器的特点;能够很好地协助水质监测人员进行水样采集,解决了一些传统的采集方式中存在的问题,提高了水质监测人员的工作效率和巡查范围,机载的摄像单元记录下的采水场景更是可以作为水样提取时的重要视频资料记录在案。
本系统主体分为两部分,一部分为四轴飞行器,此时Turbot开发板挂载在飞行器上,控制飞行器的飞行以及控制四旋翼下挂的采水单元的工作,充分利用了Turbot的片上资源,展示出Turbot优秀的处理特性;另一部分采水单元,采水单元用Genuino 101控制,整体小巧紧凑,工作高效问题,同时具备拓展采水次数的能力,可根据实际需求继续开发。
本系统的框架搭建比较完整,为后续的改进提供了很便利的接口。
